ELECTRONIQUE

Avant tout il faut trouver une télécommande
(pas si simple)
Avec les télécommandes grand publique il n y a
que des problèmes:
-mal dans la main, trop cher, manque d ergonomie, trop
gros
C est pourquoi j ai décidé d en
réaliser une moi-même
On va commencer doucement pour la première
télécommande on va réaliser une petite 12
voies
ça suffira pour mon premier modèle
réduit
Pour ça il faut d abord trouver une commande qui se
tient bien dans la main
Et la on se rend compte que Sony a fait tout le boulot pour
vous, en effet il n y a rien de mieux
Que la commande de la play station (j en dit du bien, c
normal Sony est mon ancien employeur)
Tout d abord il faut enlever tous les composants de la carte
de la play
Couper les masses des potards et connecter les boutons
intéressants sur un connecteur he10 14pin
 Apres avoir connecté la commande il suffit de
réaliser la partie la plus simple d un modèle
réduit
'l électronique'
pour ça il suffit de réaliser les deux petites
cartes que j'ai dessiné, j ai vraiment fais simple pas de
pll
juste un 18 71 pour l émetteur avec un quartz et un
18 72 pour le récepteur
pour ceux qui ne savent pas ce que c est, ce sont des
circuits intégrant un émetteur RC complet
et un récepteur complet 6 voies analogiques
mais pour ma réalisation j ai sacrifié deux
voies analogiques pour en faire 8 voies numériques
j en ai profité pour intégré un
variateur de vitesse réversible pour la propulsion, un
contrôle de
moteur de ballast réversible et 6 sorties libres pour
des commandes ultérieures ex :(6 torpilles ou 6
fusées)
tout sa sur la même carte
mais si ça vous emmerde de modifier une commande de
play y suffit de récupérer un joystick pour
pc
et de le connecter sur le db15 sans rien modifier et
ça marche aussi.
schema1
schema2 layout1
layout2 layout3
layout4
fichier
edwin
Tout d'abord une petite explication du fonctionnement de l
émetteur
A l entrée du he10 on retrouve 4 potards qui
permettent de régler la position 0 car la commande de la
play
N est pas prévue pour un ajustage de cette
position
Ensuite on verra que chaque bouton de la commande va changer
la polarisation des transistors npn
Qui vont a leur tour court-circuiter un réseaux de
résistance et changer ainsi la valeur de la
résistance
globale. l émetteur enverra une valeur entre 1 et 2
ms selon le bouton qui sera actionné sur le
récepteur
Un pic se chargera de faire la discrimination entre toutes
ces commande et s occupera de tout contrôler.
schema1
schema2 schema3
layout1 layout2
layout3 layout4
fichier
edwin
Apres avoir connecté la commande il suffit de
réaliser la partie la plus simple d un modèle
réduit
'l électronique'
pour ça il suffit de réaliser les deux petites
cartes que j'ai dessiné, j ai vraiment fais simple pas de
pll
juste un 18 71 pour l émetteur avec un quartz et un
18 72 pour le récepteur
pour ceux qui ne savent pas ce que c est, ce sont des
circuits intégrant un émetteur RC complet
et un récepteur complet 6 voies analogiques
mais pour ma réalisation j ai sacrifié deux
voies analogiques pour en faire 8 voies numériques
j en ai profité pour intégré un
variateur de vitesse réversible pour la propulsion, un
contrôle de
moteur de ballast réversible et 6 sorties libres pour
des commandes ultérieures ex :(6 torpilles ou 6
fusées)
tout sa sur la même carte
mais si ça vous emmerde de modifier une commande de
play y suffit de récupérer un joystick pour
pc
et de le connecter sur le db15 sans rien modifier et
ça marche aussi.
schema1
schema2 layout1
layout2 layout3
layout4
fichier
edwin
Tout d'abord une petite explication du fonctionnement de l
émetteur
A l entrée du he10 on retrouve 4 potards qui
permettent de régler la position 0 car la commande de la
play
N est pas prévue pour un ajustage de cette
position
Ensuite on verra que chaque bouton de la commande va changer
la polarisation des transistors npn
Qui vont a leur tour court-circuiter un réseaux de
résistance et changer ainsi la valeur de la
résistance
globale. l émetteur enverra une valeur entre 1 et 2
ms selon le bouton qui sera actionné sur le
récepteur
Un pic se chargera de faire la discrimination entre toutes
ces commande et s occupera de tout contrôler.
schema1
schema2 schema3
layout1 layout2
layout3 layout4
fichier
edwin
 Programme du PIC
source programme
compilé
En ce qui concerne l émetteur rien de bien
compliqué, des micro switch permettent de sélectionner
entre
Joystick (db15) et play (he10) et derrière un petit
ampli HF
Pour l émetteur c un tout petit peut plus
compliqué mais si peut
Tout d'abord on trouvée à l entré un
petit pré ampli d antenne suivi du 1872 qui se charge du
décodage HF
et 6 sorties pour piloter des servos (câblage
futaba)
On remarquera que la régulation des servos n'est pas
la même que la régulation du récepteur
Au cas ou un servo se metterait à délirer ou a
griller le régulateur, le système Fail safe
programmé dans le pic
Pourrais toujours fonctionner
Le pic reprend les infos des 3 derniers servos pour les
traiter
La commande 4 sert a commander un variateur
électronique réversible pour moteur
La commande 5 et 6 servent a réaliser 8 sorties
numériques dont les deux premières servent à
commander le moteur
des ballasts c est pourquoi ils sont tout de suite
câblés sur des relais pour une sortie
réversible
Les 6 dernières sorties servent à commander
des systèmes en tout ou rien par une liaison a la
masse
Programme du PIC
source programme
compilé
En ce qui concerne l émetteur rien de bien
compliqué, des micro switch permettent de sélectionner
entre
Joystick (db15) et play (he10) et derrière un petit
ampli HF
Pour l émetteur c un tout petit peut plus
compliqué mais si peut
Tout d'abord on trouvée à l entré un
petit pré ampli d antenne suivi du 1872 qui se charge du
décodage HF
et 6 sorties pour piloter des servos (câblage
futaba)
On remarquera que la régulation des servos n'est pas
la même que la régulation du récepteur
Au cas ou un servo se metterait à délirer ou a
griller le régulateur, le système Fail safe
programmé dans le pic
Pourrais toujours fonctionner
Le pic reprend les infos des 3 derniers servos pour les
traiter
La commande 4 sert a commander un variateur
électronique réversible pour moteur
La commande 5 et 6 servent a réaliser 8 sorties
numériques dont les deux premières servent à
commander le moteur
des ballasts c est pourquoi ils sont tout de suite
câblés sur des relais pour une sortie
réversible
Les 6 dernières sorties servent à commander
des systèmes en tout ou rien par une liaison a la
masse
Réglage de l émetteur
Positionné les dip switch u2 tout sur "off"
et les dip switch u1 tout sur "on" pour sélectionner
la commande psx
Pour commander un model réduit avec un joystick les
dip switch doivent être
positionné dans l ordre inverse.
Apres il faut régler les bobine pour cela il faut
connecter une résistance de 51 ohms
sur la sortie HF pointer avec un oscilloscope le collecteur
du transistor HF et régler
la bobine lc (d2) pour avoir le maximum de signal sur l
oscilloscope
Puis positionnez la pointe de touche de l oscilloscope sur
la sortie de l antenne
et bougez d1 cv4 et cv1 pour avoir le maximum de signal sur
l antenne
N'hésitez pas a recommencer tous les réglages
pour optimiser le signal de sortie
Attention pour faire un bon réglage ces
opérations doivent être faites
dans le boîtier final avec la batterie
définitive.
Pour le réglage du récepteur il faut allumer l
émetteur et le positionné à un
mètre
du récepteur. Tout d'abord il faut régler le
pré ampli pour cela il faut positionner la sonde
de l oscilloscope sur la patte 5 du 1872 et bouger d1 jusqu
a ce qu il y a le maximum de
signal sur l oscilloscope. Après il faut
régler d4 pour cela positionnez la sonde de l oscilloscope
sur
la patte 18 du 1872 et régler jusqu à obtenir
le maximum de signal. Puis réglez d1 en positionnant
la sonde sur la patte 15 et en bougent d1 au milieu de la
zone de fonctionnement
En dehors d une certaine plage il n'y a rien qui sort et
dans la plage de fonctionnement
le signal sur la patte 15 est invariant. maintenant
réglez d5 et d6 pour avoir le maximum
de signal sur la patte 15, pour optimiser le réglage
sur d6 branchez un servo sur une voie
et réglez pour avoir le minimum d oscillation du
servo. Attention a ne jamais saturer un ampli
ou à en transformer un en oscillateur.
Lorsque tout les réglages sont optimum,
éloignez l émetteur de 10m et reprenez tous les
réglages
et lorsque tous les réglages sont au top, vous pouvez
enfin programmer le µC.
recommençons tous l électronique
la première réalisation fonctionnait
parfaitement mais le spectre de fréquence dans la bande 27MHz
et complètement saturé pour preuve l état du
spectre chez moi.
 De plus le premier émetteur n'avait qu une
portée de 500m et passé deux murs de béton le
récepteur ne recevait plus rien
et comme le récepteur du 1872 n'avait pas de squelch,
si l'émetteur venait a s'arrêter, le bruit ambiant
remplaçait de signal d'émission (quel
carnage).
Pour résoudre ce problème j'ai
réalisé un émetteur bien plus puissant, et un
récepteur à double changement de fréquence munie
d un filtre a quartz.
l'émission sera modulée en FM FSK et les
données seront envoyer en numérique suivent le
protocole rs232
des valeurs des potards. Se sera de nouveau un
émetteur 14 voies (4servos et 8sorties tout ou rien)
l émetteur sera animé par un pic 16f876 car il
renferme un convertisseur analogique / numérique et une sortie
rs232, le récepteur aura le même microcontrôleur
car il possède aussi un récepteur rs232 et un
deuxième timer pour les servos. de plus ce pic a plus de
pattes que le 16f84 ce qui permet de commander une PLL
saa1057
Comme j ai recommencé la carte j ai rajouté un
système de détection de prise d eau sur la
carte.
De plus le premier émetteur n'avait qu une
portée de 500m et passé deux murs de béton le
récepteur ne recevait plus rien
et comme le récepteur du 1872 n'avait pas de squelch,
si l'émetteur venait a s'arrêter, le bruit ambiant
remplaçait de signal d'émission (quel
carnage).
Pour résoudre ce problème j'ai
réalisé un émetteur bien plus puissant, et un
récepteur à double changement de fréquence munie
d un filtre a quartz.
l'émission sera modulée en FM FSK et les
données seront envoyer en numérique suivent le
protocole rs232
des valeurs des potards. Se sera de nouveau un
émetteur 14 voies (4servos et 8sorties tout ou rien)
l émetteur sera animé par un pic 16f876 car il
renferme un convertisseur analogique / numérique et une sortie
rs232, le récepteur aura le même microcontrôleur
car il possède aussi un récepteur rs232 et un
deuxième timer pour les servos. de plus ce pic a plus de
pattes que le 16f84 ce qui permet de commander une PLL
saa1057
Comme j ai recommencé la carte j ai rajouté un
système de détection de prise d eau sur la
carte.
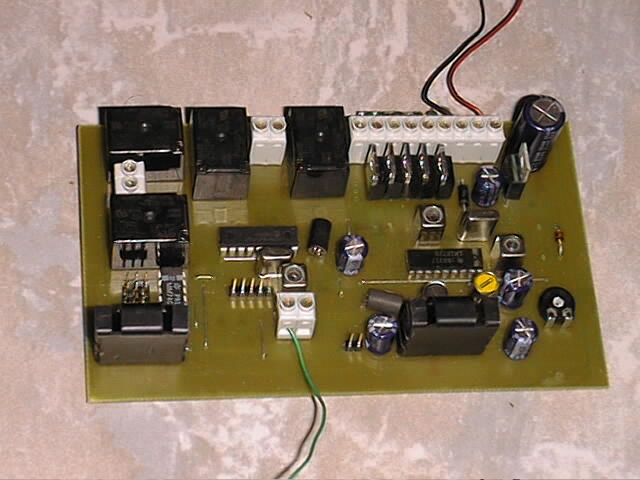
explication du fonctionnement de la carte TX
schema1
schema2 schema3
layout1 layout2
layout3 layout4
tout d'abord les informations proviennent de la commande de
la Playstation (la même que tout a l'heurs )
Pour recevoir les informations de l'état des potards
en volt il suffit d injecter un courent constant dans les
résistances, et c'est là que le petit ampli
opérationnel intervient en génèrent un courent
0.7µA sur chaque voie de la télécommande ce qui
permet d'obtenir a peut près 0-5v sur chaque voie analogique.
pour les boutons il s'agit d une simple mise a la masse sur le port B
du pic.
ces informations sont codées en 5 octets +1 de
synchronisation
Les 4 premiers servent à donner la position des
potards et le cinquième défini la position des
boutons.
la trame a cette forme
|
ff
|
xx
|
xx
|
xx
|
xx
|
xx
|
|
synchro
|
potard1
|
potard2
|
potard3
|
potard4
|
8boutons
|
Une PLL et un VCO s'occupe de générer la
fréquence d émission. La PLL et une saa1057 et le VCO
est réalisé avec un petit transistor 2n2222
monté en colpits. 3 transistors 2n2219 sont monté en
cascade pour générer l'étage de puissance, l
'accouplement de chaque étage est réalisé par un
transformateur LC en résonance, c'est très stable et
très facile a régler, croyez mois les adaptation en PI
fonctionne bien si il sont bien réglés et c est la
galère pour les adapter de plus les adaptation en PI ont la
fâcheuse tendance à entrer en oscillation. Ma solution
est un peu plus cher à réaliser mais elle vaut son
pesant d or.
Pour régler tout sa, branchez une résistance
de 50 ohm sur la sortie de l émetteur et régler tous
les transfo de manière à obtenir le maximum de signa la
sur la sortie. Régler les dans l ordre suivant D5 D6 D1 CV4 et
CV1
et recommencez au bout de 3 tour vous allez avoir le maximum
de signal.
et c'est fini pour l'émetteur.
Les premiers test sont très satisfaisant j'ai obtenu
20V crête crête sur 50 ohms, ce qui me donne une
puissance d’émission de 1W soit une porté de 4 a 5
Km (à peut près). Ces relativement confortable pour le
reste des opérations
Explication du fonctionnement du récepteur.
schema1
schema2 schema3
schema4 layout1
layout2 layout3
layout4 layout5
Je dirais bien que c'est simple mais ma copine dit que c'est
un mot que j'emploie trop souvent. Donc tout d'abord il faut recevoir
les infos et pour sa j'utilise un MC3362 il s'agit d un
récepteur fantastique a double changement de fréquence
qui n a pas besoin de pre-ampli ce récepteur est tellement
sensible avec ces 0.6µv pour un signal sur bruit de 20db qu avec
un pre-ampli on risque de tout dégrader. l 'utilisation d un
filtre a quartz rend la sélectivités du signal
phénoménal. la fréquence de fonctionnement est
généré par le VCO qui se trouve dans le MC3362
et est stabilisé par la PLL saa1057. le signal FSK est
décodé dans le récepteur et est transmis au pic
dans l'entrée UART RX
Le pic. Une voie est sacrifier pour réaliser une
commande réversible sur le moteur de propulsion, les autres
voies analogique permettent de commander des servos. Les 8 sorties
tout ou rien commandent des mises à la masse sauf sur la
commande des ballastes qui est réversible. la détection
d'eau dans le sous marin est réalisé par deux
transistors monté en Darlington qui rentre en conduction si un
courant même faible circule entre les deux bornes du
détecteur (c' est juste deux fils qui court le long du sous
marin au font ).
Les réglages correspondent au squelch a la tension
d'alim et à la fréquence de réception qui doit
être réglés au milieu de sa plage de
fonctionnement.
Pour la réalisation il y a juste un point
précis a bien observer, la carcasse du filtre a quartz et
relié à la pin central du filtre, en loculeuse dans mon
montage au +Vcc, donc il faut bien l'isoler pour ne pas qu il entre
en court-circuit avec le plan de masse ou le MC3362.
Les câbles
pour sortir tous les fils importants du sous marin il a
fallut trouver une astuce car les connecteurs standards ont tendance
à s’oxyder, sauf les connecteurs qui ont des pattes
dorées à l’or fin. Mais la ces connecteurs ne sont
pas étanches. Pour résoudre ce problème
j’ai simplement posé des pattes de connecteur he10 sur le
haut du submersible. Ces pattes ont différentes
fonctions.
La première est de mettre en marche et
d’arrêter le sous-marin, pour cela j’utilise des
petits jumpers que je pose entre deux pattes pour fermer le
contact.
La deuxième est de pouvoir reprogrammer le sous-marin
et pour cela je sort les cinq pattes de programmation série
(pour changer la fréquence par exemple).
La troisième est de pouvoir recharger les batteries
et pour cela je sort les trois fils+gnd pour le
rechargement.

CA MARCHE MAIS PAS COMME JE VEUX
Une petite erreur s'est glissée dans mes schemas .En
effet lors de la reception des données par le
recepteur
le circuit de reception mc3362 inversait sa sortie (les 1
devait des 0 et vice versa). A part ce petit detail le reste
fonctionnait. mais comme la société Medelor vient de
faire une promo tres interessante sur les inductances et
les
circuits de reception MC3359 je suis en train de vous
preparer des schemas de recepteur à moins de 15€
piece
en simple changement de frequence.
Et de plus je vais refaire l'emetteur pour pouvoir monter la
puissance et obtenir une plus grande portée (20Km)
ça sert à rien c'est juste pour le fun. Et la
prochaine version de l emetteur sera plus simple car j ai
decidé de supprimer
la PLL et de la remplacer par un quartz. Ce sera plus facile
à mettre au point.
Sa y est je viens de finir les émetteurs et les
récepteurs qui me permettent de piloter mes modèles
réduit.
Finalement comme je suis très content de mon emeteur
de 0.5W, je m en contente pour le moment pour piloter tout ce que je
met sur l eau.
Vous trouverez tout sa dans la partie électronique,
la : électronique